
树莓派官方摄像头模块 V3 的配置及 libcamera 的使用教程
树莓派官方摄像头模块 Camera Module 3 发布之后,有些朋友使用 libcamera 软件库来拍摄会发现报错: [0:11:48.500378214] [2153] INFO Camera camera_man [看全文]
树莓派官方摄像头模块 Camera Module 3 发布之后,有些朋友使用 libcamera 软件库来拍摄会发现报错: [0:11:48.500378214] [2153] INFO Camera camera_man [看全文]

树莓派官方发布了新一代摄像头模块 Camera Module 3,基于索尼 IMX708 传感器开发,起价 25 美元(约 170 元人民币)。 Camera Module 3 相机模块带来了对 HDR 和自动对焦的支持, [看全文]
ZoneMinder 是一套基于 Linux 的摄像机的视像数据监控软件,由于是开源软件,它支持大多数模拟或 IP 摄像机。ZoneMinder 支持单一或多台视像镜头应用,包括摄取、分析、记录、和监视来源,要使 Zone [看全文]
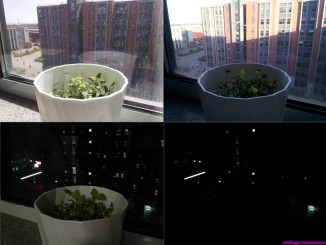
家里的树莓派闲置一段时间了,一直不知道做什么。最近春天到了,看着小树苗慢慢长大的样子,真的很想记录下来,所以就动手啦!最终效果视频见文末。 准备工作 首先请出主角:一个闲置的树莓派、摄像头,当然还有花种、花盆。 考虑到树莓 [看全文]
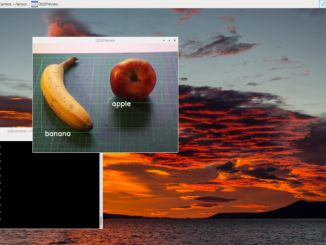
Raspberry Pi OS Bullseye 版本发布时弃用的 Picamera 以新面貌回归了,那就是 Picamera2 库。 下面介绍使用树莓派摄像头模块,用 Picamera2 库和 TensorFlow Li [看全文]

在 Raspberry Pi OS 2021-10-30 的版本更新中。之前的摄像头命令 raspistill 被移除,替代方案是 libcamera。 这导致之前的一些基于 raspistill 命令的教程无法在新系统里 [看全文]

2023.5.14 更新,对于树莓派官方摄像头 V3 的配置和使用请参考这里 https://shumeipai.nxez.com/2023/05/14/camera-module-v3-configuration-and [看全文]

Cable Extension Kit(摄像头 MIPI 延长线套件)可以用于树莓派 3B+ 和树莓派 4B 的官方摄像头上,包括官方摄像头模块 500 万、800 万和 HQ 摄像头。把摄像头的 MIPI 信号转成 CM [看全文]
Copyright © 2024 | 树莓派实验室. Raspberry Pi is a trademark of the Raspberry Pi Foundation. 沪ICP备19016635号-2