
树莓派驱动OLED屏幕以及花屏问题的处理
来自好奇吖斌的投稿,感谢~ 最近在学习树莓派,驱动OLED屏时出现了一个问题,就是花屏,折腾了两天后发现原来这个OLED的驱动芯片不是SSD1306而是SH1106,所以用Adafruit_Python_SSD1306这个 [看全文]
来自好奇吖斌的投稿,感谢~ 最近在学习树莓派,驱动OLED屏时出现了一个问题,就是花屏,折腾了两天后发现原来这个OLED的驱动芯片不是SSD1306而是SH1106,所以用Adafruit_Python_SSD1306这个 [看全文]

无需焊接、不用拆,只需要跟着步骤操作,30 分钟后,让Siri为你管理家电。文中视频演示了房间里有两盏宜家的台灯,我现在可以通过Siri,用语音来控制灯的开关、颜色变换,还可以用 iPhone 原生的「家居」应用,通过上滑 [看全文]
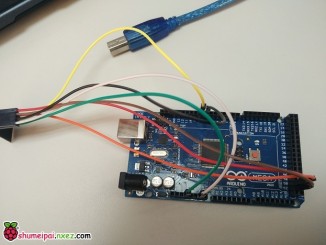
Arduino具有丰富的外部接口,与树莓派的IO口最大的不同在于Arduino具有模拟输入接口,可以测量IO口上的模拟值。Arduino与Raspberry通过串口(Serial)通信的方案一般有两种,一是通过树莓派GPI [看全文]
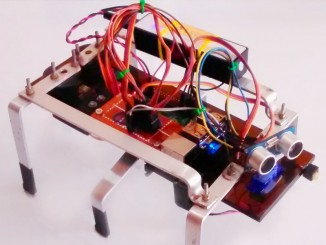
目前用 Arduino、树莓派做小车、无人机、机器人的不少。趣无尽分享一款在由Roland Pelayo做的一个“六足行走机器人”。这个树莓派动力机器人能自主运行,自动避障,且也能实现手动模式由智能手机控制。 来具体看下过 [看全文]
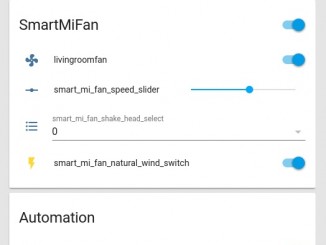
感谢 hahack42 的投稿。作为一个完全开源的智能音箱项目,叮当也能够很方便的接入其他智能家电,并声控它们。本文将介绍如何使用叮当声控智米电风扇。 前言 dingdang-robot (以下简称“叮当”),是我在今年5 [看全文]
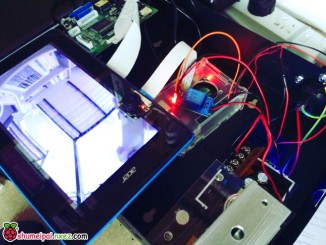
来自 leafspace 的投稿,感谢~ 本文使用树莓派DIV搭建一个二维码门禁预约管理系统。起源是学校里需要对活动室进行人员管理,保护学校固定资产。原先学校的活动室安装的门禁系统是IC卡片式的,由于时间较长,管理不当,相 [看全文]

眼看已经进入三伏天,你的树莓派有没有开始发烧呢?为了提高树莓派散热效果,通常我们在树莓派上加装散热风扇,但是问题是只要通电,散热风扇就一直转,有的强力风扇甚至会发出噪音。为解决这个问题,下面使用了一个三极管来控制树莓派散热 [看全文]
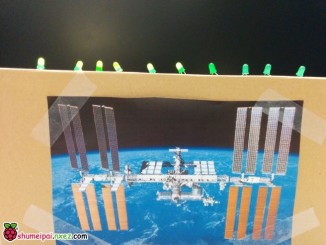
本文翻译自:https://www.raspberrypi.org/ 使用Python requests模块访问People in Space API,并创建一个指示灯,以显示当前在空间中的人数。 2015年12月15日, [看全文]
Copyright © 2024 | 树莓派实验室. Raspberry Pi is a trademark of the Raspberry Pi Foundation. 沪ICP备19016635号-2