在树莓派上使用 GPIO Zero 控制 GPIO
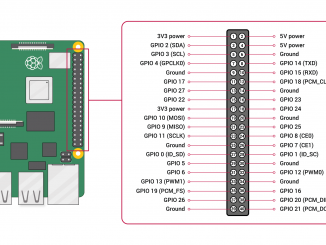
树莓派的 40 Pin GPIO 引脚功能如下图。任何 GPIO 引脚都可以在软件中指定为输入或输出,可适用广泛的用途。
树莓派的 40 Pin GPIO 引脚功能如下图。任何 GPIO 引脚都可以在软件中指定为输入或输出,可适用广泛的用途。

wiringPi 是一个被广泛使用的树莓派 GPIO 库,使用 C 语言开发。wiringPi 提供了丰富的接口,GPIO控制,中断,多线程。wiringPi 的安装我们之前介绍过,只需要运行命令:

相比树莓派零、1、2 以及 3 的双串口 UART0(PL011)和 UART1(mini UART),树莓派4 中新增了 4 个 PL011 串口共计有 6 个 UART,整理此笔记用作记录和配置参考。
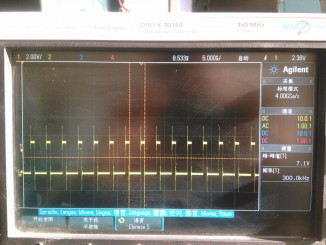
步进电机以及无源蜂鸣器这些都需要脉冲信号才能够驱动,这里将用GPIO的PWM接口驱动无源蜂鸣器弹奏乐曲,本文基于树莓派Mode B+,其他版本树莓派实现时需参照相关资料进行修改! 这是一篇发布于 4年 前的文章,其中的信息 [看全文]
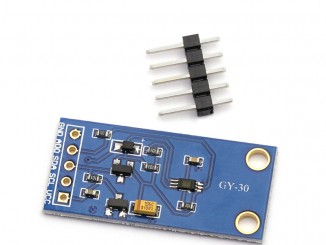
BH1750FVI 是一款 IIC 接口的数字型光强度传感器集成电路。下面介绍一下其在树莓派下的用法。 一、前期准备 1、环境要求 GY30模块(BH1750FVI传感器) 树莓派 Raspbian 系统 python-s [看全文]

这是一款针对树莓派 4B 特别设计的散热风扇,也兼容树莓派 3B+/3A+/3B/2B。 项目地址: https://make.quwj.com/project/272 购买地址: http://link.nxez.com [看全文]

LCD 1602 液晶屏模块的使用,之前在「基于PHP探针和Python爬虫的服务器监控」一文中有详细介绍。这个屏幕还有一种 I2C 方式的驱动模块,可以极大的简化接线和驱动程序。下面树莓派实验室将对这个模块的使用做一个介 [看全文]

来自 RaspiSQH 的投稿。 前言 dht11是一个较为普遍的温湿度传感器,但是在树莓派上读取却不容易。 转了一圈论坛、百度、实验室,例子里面大多数都是用库或者直接硬来(直接读取信号脚分析)。这些办法虽然行之有效,但是 [看全文]
Copyright © 2024 | 树莓派实验室. Raspberry Pi is a trademark of the Raspberry Pi Foundation. 沪ICP备19016635号-2