
前言
本文将详细介绍树莓派的串口(UART)配置和使用,并结合一个modbus RTU从机的例子说明树莓派串口的应用。
在开始前说明以下几点
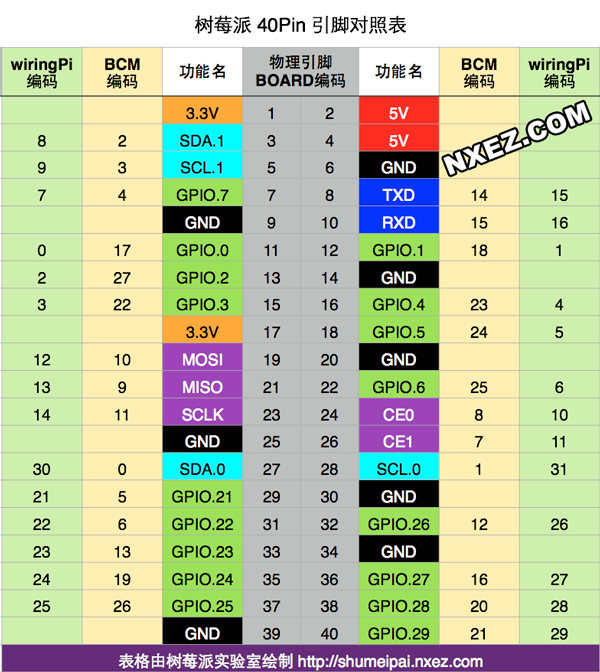
1.树莓派UART端口的位置
TXD位于HEAD-8
RXD位于HEAD-10
GND位于HEAD-6(可选其他GND)
2.树莓派的TXD应接USB转串口设备的RXD,当然如果测试失败请交换RXD和TXD的顺序
3.经过很多次的测试(N>25),当波特率为115200时打开树莓派的UART时,树莓派会莫名其妙的发送一字节0xF8,该问题始终无法解决。不过波特率为9600时并没有此问题,猜测是树莓派硬件或内核驱动问题。
4.树莓派的串口默认为SSH调试使用,若要使用串口需要修改两处文件。
5.2016.11起新系统需要通过这个方法开启SSH服务
修改两处文件
1./boot/cmdline.txt
输入以下指令
sudo nano /boot/cmdline.txt
删除以下部分
console=ttyAMA0,115200 kgdboc=ttyAMA0,115200
最终变为
dwc_otg.lpm_enable=0 console=tty1 root=/dev/mmcblk0p2 rootfstype=ext4 elevator=deadline rootwait
2./etc/inittab
输入以下指令
sudo nano /etc/inittab
注释最后一行内容
#T0:23:respawn:/sbin/getty -L ttyAMA0 115200 vt100
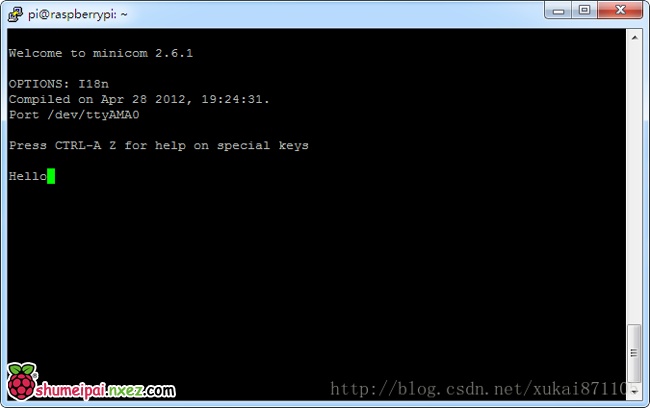
使用minicom
配置完之后便可测试一下树莓派的UART是否正常工作,而minicom便是一个简单好用的工具。minicom是linux平台串口调试工具,相当于windows上的串口调试助手。
1.minicom安装
sudo apt-get install minicom
2.minicom启动
minicom -b 9600 -o -D /dev/ttyAMA0 #-b代表波特率,-D代表端口,/dev/ttyAMA0 类似于windows中的COM1,-o功能暂时未知。
3.minicom发送内容
直接在控制台中输入内容即可,如果minicom打开了回显可在控制台中观察到输出内容,如果回显关闭则控制台中没人任何反应,千万不要以为minicom没有正常工作。
4.minicom回显控制
先Ctrl+A,再E。可翻转回显状态(原来回显打开则此事回显关闭)
5.minicom回显关闭
先Ctrl+A,再Q。
使用pyserial
minicom仅满足调试用途,如果需要编程解决问题那么python的serial扩展库——pyserial则是一个不错的选择。pyserial模块非常好用,后面的文章还会分析如何使用pyserial控制GPRS模块。
1.pyserial安装
安装pyserial扩展库有很多种方法,可使用pip或者easy_install安装,也可以直接选择apt-get工具安装。
若使用apt-get工具安装,可输入以下指令
sudo apt-get install python-serial
2.串口回显程序
非常简单的一个串口程序,树莓派通过串口返回接收的内容。
# -*- coding: utf-8 -*
import serial
import time
# 打开串口
ser = serial.Serial("/dev/ttyAMA0", 9600)
def main():
while True:
# 获得接收缓冲区字符
count = ser.inWaiting()
if count != 0:
# 读取内容并回显
recv = ser.read(count)
ser.write(recv)
# 清空接收缓冲区
ser.flushInput()
# 必要的软件延时
time.sleep(0.1)
if __name__ == '__main__':
try:
main()
except KeyboardInterrupt:
if ser != None:
ser.close()
总结
由于可借助python标准库使得树莓派的串口格外好用。是不是可以拿树莓派做一个Modbus RTU从机,的确可以请期待后面的博文吧。
参考资料
1.minicom使用国外博客
2.elinux python-serial 安装pyserial及例程等
出处:http://blog.csdn.net/xukai871105
更多树莓派串口相关内容:https://shumeipai.nxez.com/?s=%E4%B8%B2%E5%8F%A3

发表评论