MCC HATs 简介
树莓派的强大功能和多样的能力已经广泛应用于整个工业中,其中Measurement Computing已经将树莓派集成到我们的 WebDAQ 系列 数据记录器中。基于树莓派3和数据采集设备,MCC已研发出高性能 WebDAQ 504 声学 /振动记录仪。该设备可获取并记录 24 位数据,具备4路通道,且每通道均可进行 FFT 数学分析,同时将数据显示在Web服务器的 UI界面上。树莓派在高性能处理器,专业工程应用中的成功,证明了它一直处于工业设计中OEM首选的地位。

Measurement Computing提供了四种针对测试和测量应用的产品,这些产品符合树莓派HAT标准。这些设备小巧,可堆叠,同时保持了MCC数据采集产品这30多年来一如既往的品质。

MCC 118 允许用户以100 KS/s的总吞吐量测量共计8路单端信号数据。同时可以在单个树莓派上堆叠8个 HAT,以创建一个64通道设备,最高以320KS/s的采样 组合速率读取数据。
MCC 134 提供4路24位热电偶输入,可测量多种最受欢迎的热电偶类型,包括J,K,R,S,T,N,E以及B型。每种通道类型都可以基于自身来选择。
MCC 152 提供2路12位模拟信号输出通道以及8路5V或 3.3V DIO通道,可以创建完整的多功能树莓派测量和控制系统。
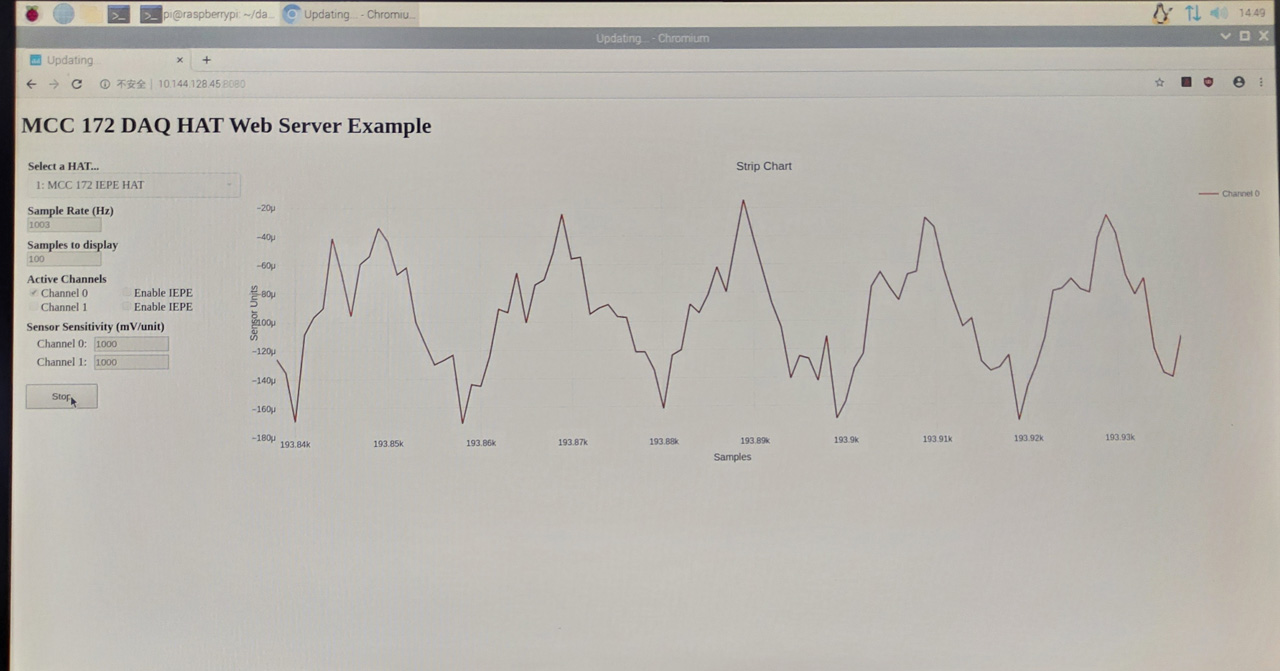
MCC 172 专为基于树莓派的振动,声音和声学应用而设计。 它提供两路24位模拟输入,采样率高达51.2kS /s/ch,用于测量IEPE传感器,如加速度计和麦克风。
采集机器人的介绍
采集机器人可以用来进行机器人科研研究,通过基于树莓派的数据采集模块可让普通机器人拥有感知和交互功能。采集机器人在工业领域可以在不同由工作人员操作的场景进行测试测量和控制操作。
在科研领域,采集机器人可以用来验证基于复杂传感器的采集,处理以及分析算法。是低成本测试和验证方案。
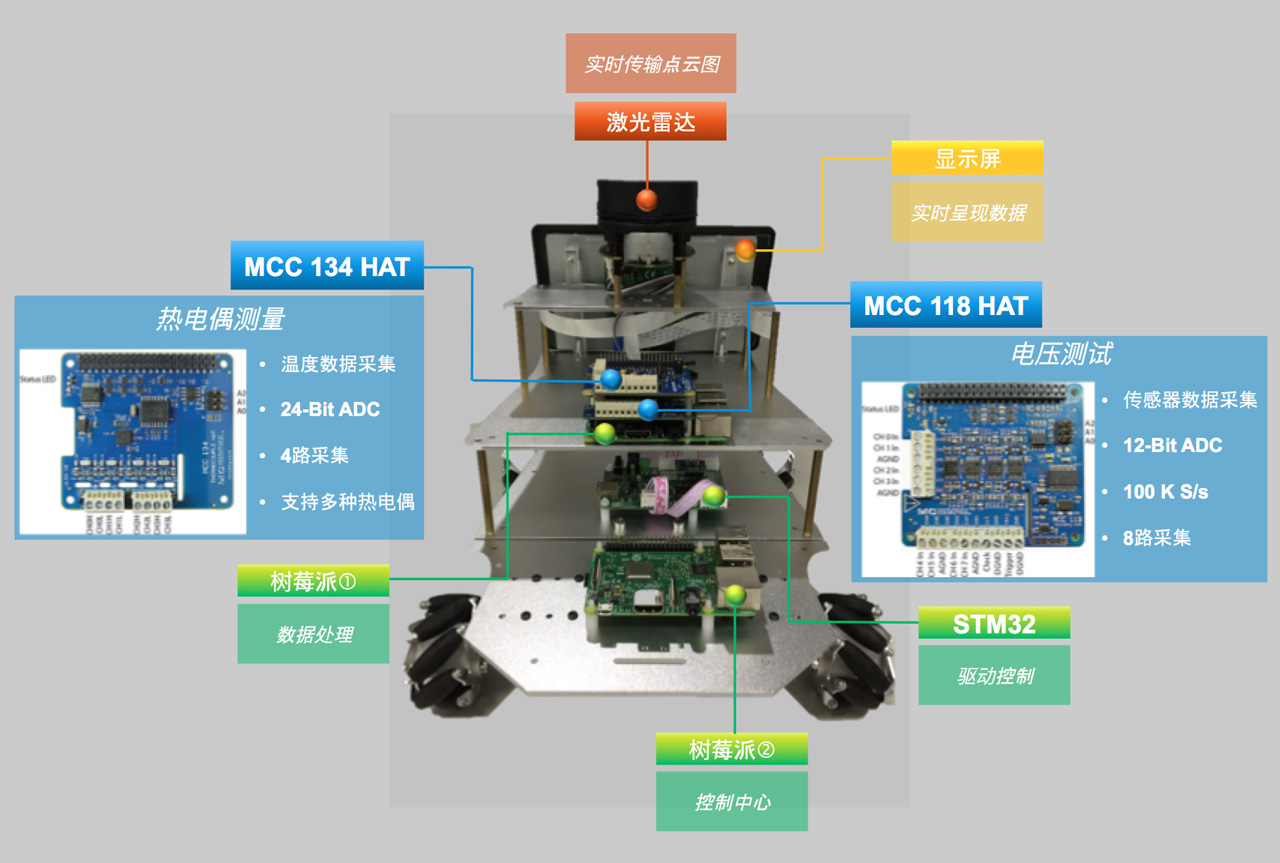
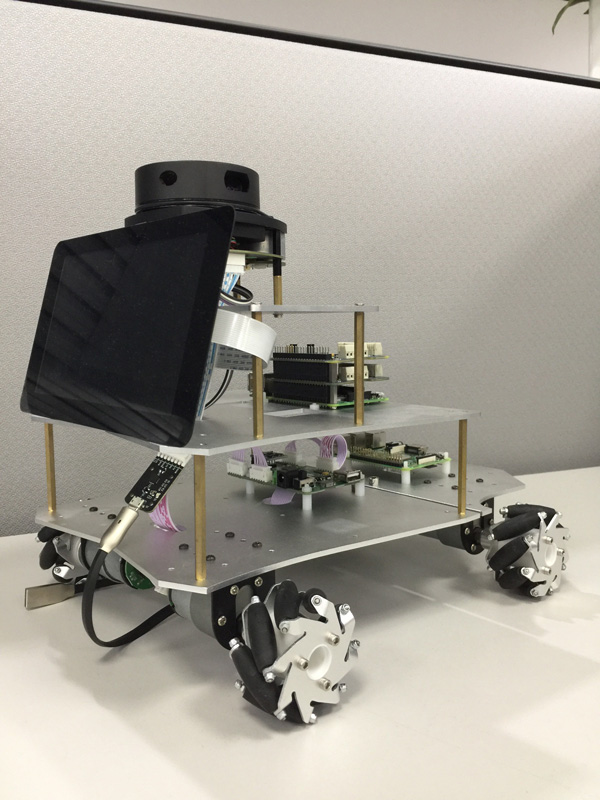
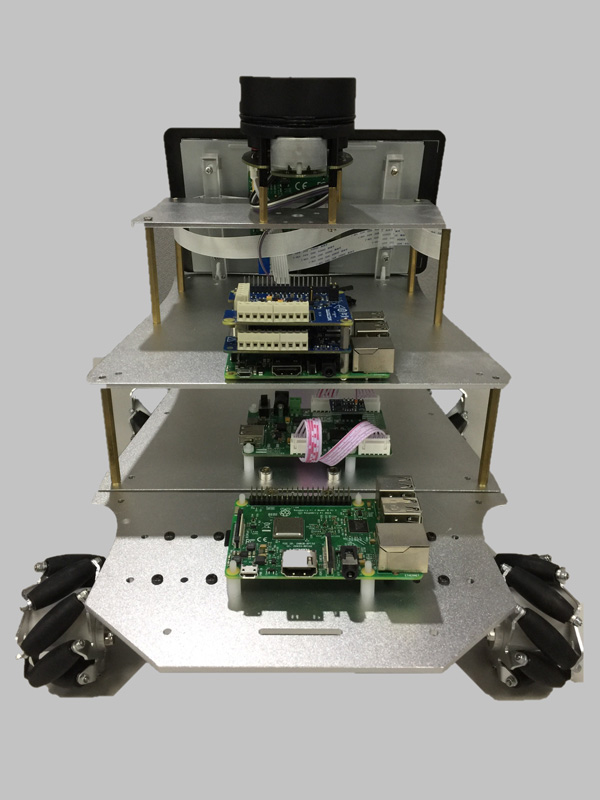
采集机器人硬件架构:

这款机器人搭载了两块树莓派,分别用于小车的控制和环境数据的采集。
车身搭载了 MCC 118 和 MCC 134 两款数据采集卡,可以用来完成电压测量和热电偶测量。
车顶的显示屏用于显示现场环境的实时数据。
使用和展示
首先让电脑、控制平板、小车上的两台树莓派,四者接入同一局域网并确认互相可以通信。
给小车自带的树莓派1 接显示器,获取一下它在局域网内的 IP 地址。
打开电脑使用 VMware 虚拟机软件启动 Ubuntu 。
机器人使用了 RikirobotROS 平台,首先需要先自行构建好地图。
修改系统配置中 RikiRobot 的 IP 和 Riki_control_host 的 IP。
再通过 SSH 登录到树莓派。
ssh rikirobot@192.168.1.xxx roslaunch rikirobot bringup.launch
另外再打开一个终端,运行下面的命令启动主控。
roslaunch rikirobot navigate.launch
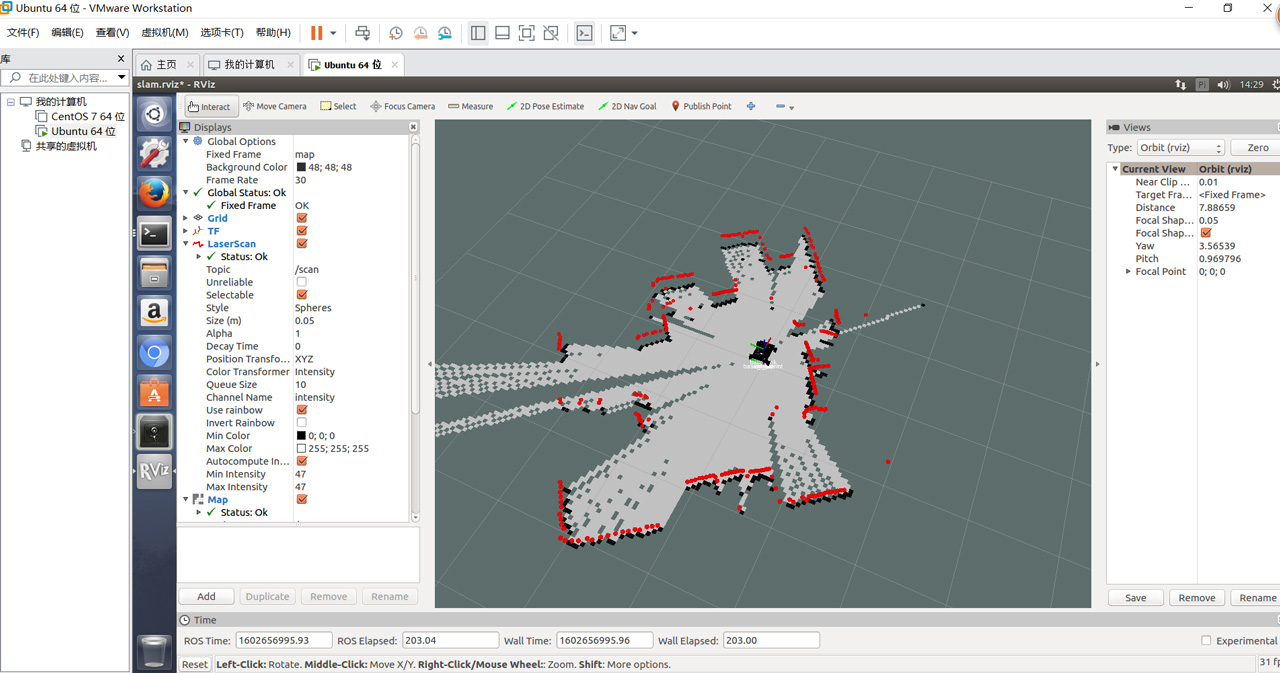
打开第三个终端,启动 ROS。
rosrun rviz rviz
在菜单 File 下点击 Open Config,找到 ~/catkin_ws/src/rikirobot_project/rikirobot/rviz/navigate.rviz 文件。选择打开,载入之前已经构建好的地图。
到这里,就可以在平板和电脑上查看机器人周围的地图信息。
配置好树莓派上的数据采集脚本 /var/www/html/pi-dashboard-daq/config.php 中的 IP 地址为树莓派的 IP 地址。
然后就可以通过平板的浏览器登录树莓派(也就是机器人)的 IP 地址。
http://树莓派IP地址:11311
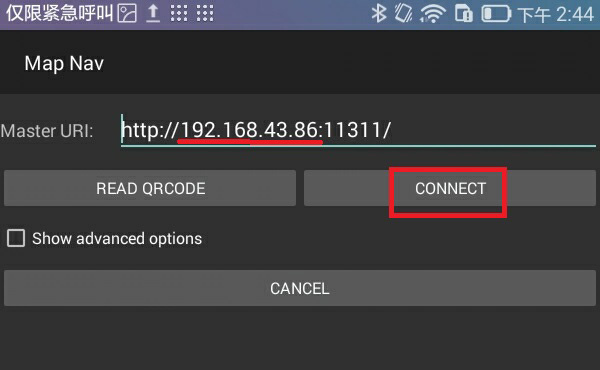

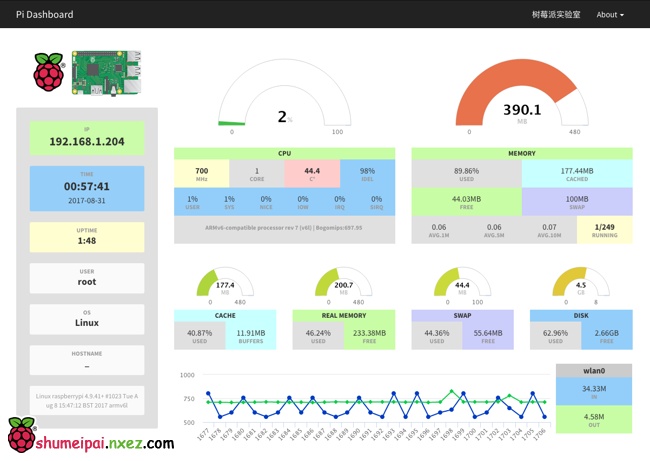
采集到的数据可以通过 Web 实时查看到。
http://树莓派IP地址/pi-dashboard-daq
联系 MCC
Measurement Computing 公司的技术支持工程师(TSE)凭借在硬件和软件方面的专业知识与丰富经验, 不仅为客户选取最合适的数据采集产品,同时帮助客户快速搭建数据采集系统,最终完成数据采集任务。
TSE 团队将在工作日的上午9:00至下午6:00接听您的来电 (021-50509819)
email: sales.china@mccdaq.com
https://www.nxez.com/partner-mcc


发表评论