
超声波测距的原理很简单,高中物理题不是做过很多次了么 :D
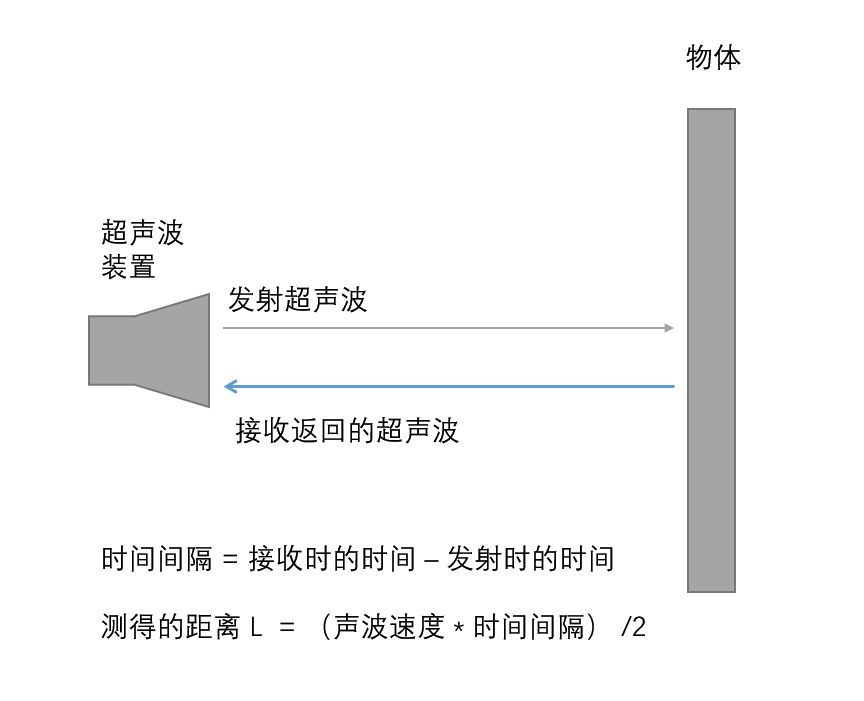
超声波测距原理
可以看到,知道时间间隔就能得到距离 L。
那么 HC-SR04 是怎么测距的呢?又怎么使用树莓派控制它?
HC-SR04 介绍
HC-SR04 模块可以测量 3cm – 4m 的距离,精确度可以达到 3mm。这个模块包括 超声波发射器、超声波接收器和控制电路三部分。有 4 个引脚。
HC-SR04 实物图
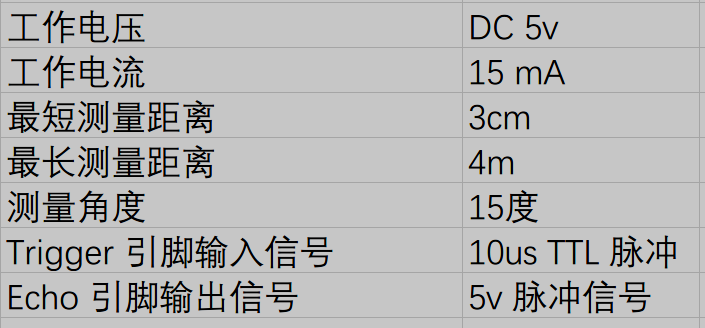
HC-SR04参数表
接线方式
4 个引脚由 2 个电源引脚(Vcc 、GND)和 2 个控制引脚(Trig、Echo)组成。
Vcc 和 Gnd 接 5v DC 电源,但不推荐用独立电源给它供电,应使用树莓派或单片机的 GPIO 口输出 5v 和 Gnd 给它供电。不然会影响这个模块的运行。
Trig 引脚用来接收来自树莓派的控制信号。接任意 GPIO 口。
Echo 引脚用来发送测距结果给树莓派。接任意 GPIO 口。
(注意 Echo 返回的是 5v信号,而树莓派的 GPIO 接收超过 3.3v 的信号可能会被烧毁,因此需要加一个分压电路)
HC-SR04 的测距过程
1. 树莓派向 Trig 脚发送一个持续 10us 的脉冲信号。
2. HC-SR04 接收到树莓派发送的脉冲信号,开始发送超声波 (start sending ultrasoun),并把 Echo置为高电平。 然后准备接收返回的超声波。
3. 当 HC-SR04 接收到返回的超声波 (receive returned ultrasound) 时,把 Echo 置为低电平。
从上述过程可以看出, Echo 高电平持续的时间就是超声波从发射到返回所经过的时间间隔 ~
请对照下图。

电路图与 python 程序
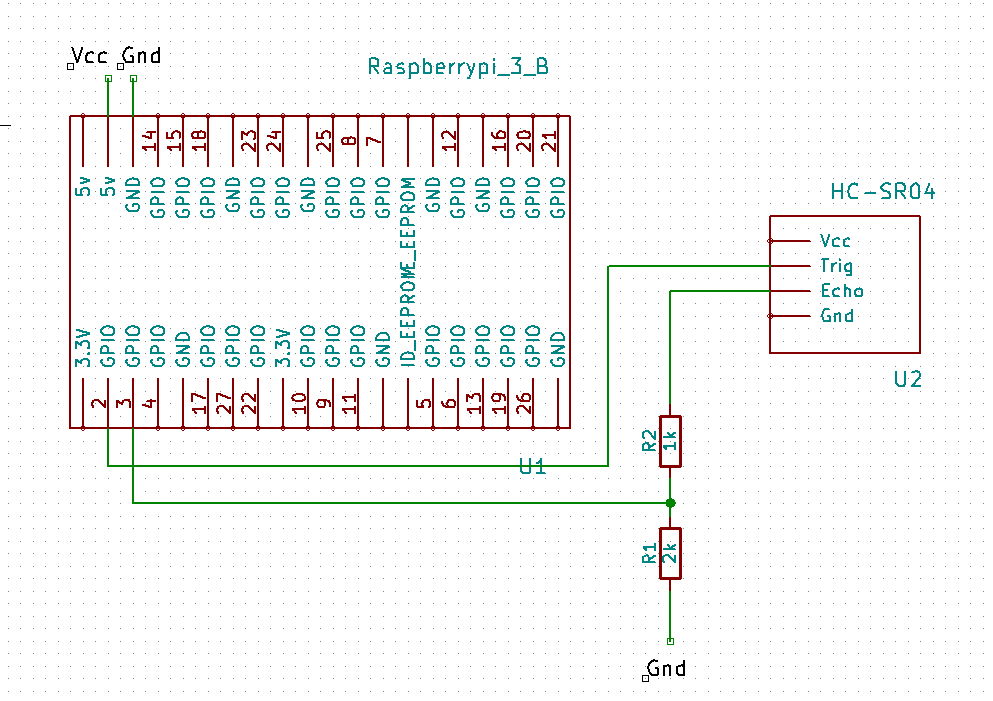
电路图
接线跟前文所说的一样。 GPIO 2 脚接 Trig , GPIO 3 脚接 Echo 。树莓派的 +5v 和 Gnd 与 HC-SR04 的 Vcc 和 Gnd 相连。还有一个分压电路,一端接 Echo ,另一端接 Gnd。
1k 和 2k 电阻组成了一个分压电路,使 GPIO 3 脚的电压降到了 3.3v 左右。
python 程序
初始化相关引脚:
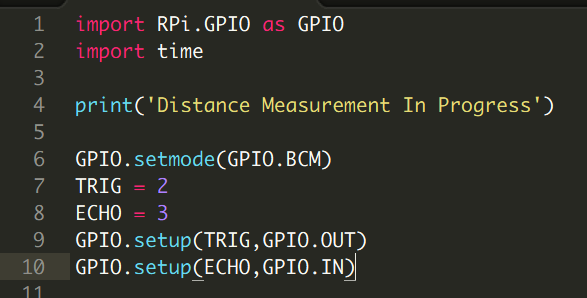
2 脚连 Trig ,设为输出模式; 3 脚连 Echo,设为输入模式。
然后向 Trig 引脚输入 10us 的脉冲:
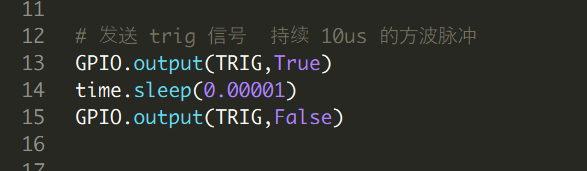
time.sleep() 接收的参数单位为 s ,于是把10 us 转换为 0.00001 s 。
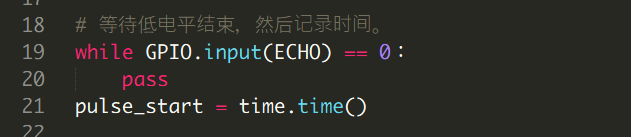
接收到这个脉冲后,HC-SR04 发射出超声波,同时把 Echo 置为高电平。在发射之前,Echo 一直为低电平。
据此编写程序,记录超声波发射时的时间。
然后记录超声波返回时的时间。
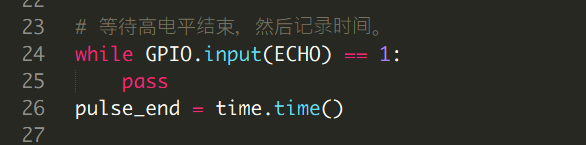
这样就获得了我们需要的数据 pulse_start 和 pulse_end ,可以算出距离了~
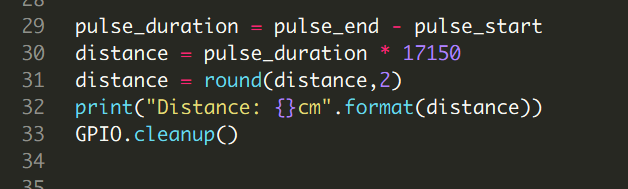
测得距离(单位:m) = (pulse_end – pulse_start) * 声波速度 / 2
声波速度取 343m/s 。
然后再把测得的距离转换为 cm。
测得距离(单位:cm) = (pulse_end – pulse_start) * 声波速度 / 2 * 100
= (pulse_end – pulse_start) * 17150
以下是完整代码。
#导入 GPIO库
import RPi.GPIO as GPIO
import time
#设置 GPIO 模式为 BCM
GPIO.setmode(GPIO.BCM)
#定义 GPIO 引脚
GPIO_TRIGGER = 23
GPIO_ECHO = 24
#设置 GPIO 的工作方式 (IN / OUT)
GPIO.setup(GPIO_TRIGGER, GPIO.OUT)
GPIO.setup(GPIO_ECHO, GPIO.IN)
def distance():
# 发送高电平信号到 Trig 引脚
GPIO.output(GPIO_TRIGGER, True)
# 持续 10 us
time.sleep(0.00001)
GPIO.output(GPIO_TRIGGER, False)
start_time = time.time()
stop_time = time.time()
# 记录发送超声波的时刻1
while GPIO.input(GPIO_ECHO) == 0:
start_time = time.time()
# 记录接收到返回超声波的时刻2
while GPIO.input(GPIO_ECHO) == 1:
stop_time = time.time()
# 计算超声波的往返时间 = 时刻2 - 时刻1
time_elapsed = stop_time - start_time
# 声波的速度为 343m/s, 转化为 34300cm/s。
distance = (time_elapsed * 34300) / 2
return distance
if __name__ == '__main__':
try:
while True:
dist = distance()
print("Measured Distance = {:.2f} cm".format(dist))
time.sleep(1)
# Reset by pressing CTRL + C
except KeyboardInterrupt:
print("Measurement stopped by User")
GPIO.cleanup()
作者:jiang
链接:jianshu.com/p/293415ae3e9c

这脉宽测量方法也太硬核了!严重怀疑OS调度会影响计时精度。
一般会用arduino测量后再通过串口、以太网等发送给树莓派吧。
reiyawea 说的有道理,系统计时不会精确到纳秒
其实不需要记录发射时间,只要以固定频率发射,然后记录接收的时间间隔,就可以计算距离了
你是否验证过你说的方法的可行性。假设接收时刻接收间隔之差只能得到发射间隔。T为发射周期,t0为发射零时刻,按照你的模型是未知的。那么有t1 = t0 + dt;t2 = t0 + T + dt;t3 = t0 + 2*T + dt;这个方程组你能求出dt来么?
linux不是实时系统,不能生搬arduino硬套。
为什么我跑的差不多的代码出来的就是0.16cm左右,不论我怎么调超声波传感器的距离
做这个还是定时/计数器得劲
中断屏蔽
请问多路超声波测距的话,有程序代码吗?
多路建议用多个脚本实现