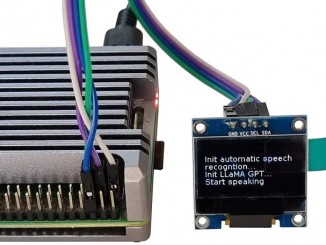
在树莓派上运行语音识别和 LLama-2 GPT!
本文转自 https://mp.weixin.qq.com/s/rh9t7Wt7DVHL3P7xqwG3HQ,作者 Dmitrii Eliuseev。 目前,绝大多数大模型运行在云端服务器,终端设备通过调用api的方式获得 [看全文]
本文转自 https://mp.weixin.qq.com/s/rh9t7Wt7DVHL3P7xqwG3HQ,作者 Dmitrii Eliuseev。 目前,绝大多数大模型运行在云端服务器,终端设备通过调用api的方式获得 [看全文]

常用的计时时钟芯片有 DS1302、DS1307、DS3231,各型号还有衍生型号。都是 Dallas 生产的芯片。其中 DS1302 和 DS1307 可以看成是同一芯片的不同协议版本(SPI 和 I2C)。他们在树莓派 [看全文]

终于,Python 3.11 正式版发布了! 2020 年 1 月 1 日,Python 官方结束了对 Python 2 的维护,这意味着 Python 2 已完全退休,进入了 Python 3 时代。打从进入 3 版本以 [看全文]
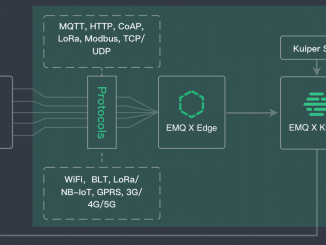
智能家居系统利用大量的物联网设备(如温湿度传感器、安防系统、照明系统)实时监控家庭内部状态,完成智能调节、人机互动。随着物联网技术的发展,其应用范围、数据规模、市场份额将进一步扩大,智能家居设备之间的智能联动也将变的越来越 [看全文]

背景 楼主有一台树莓派4B开发板(8G内存版),是目前的顶配机型。这一年来的业余时间,除了写Java、架构方面的文章,也陆续折腾了不少树莓派上的好玩小项目,在此新开一个树莓派实战的文章系列,分享给粉丝和读者。 什么是树莓派 [看全文]
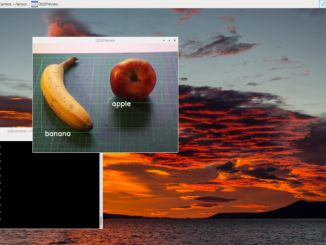
Raspberry Pi OS Bullseye 版本发布时弃用的 Picamera 以新面貌回归了,那就是 Picamera2 库。 下面介绍使用树莓派摄像头模块,用 Picamera2 库和 TensorFlow Li [看全文]

相比树莓派零、1、2 以及 3 的双串口 UART0(PL011)和 UART1(mini UART),树莓派4 中新增了 4 个 PL011 串口共计有 6 个 UART,整理此笔记用作记录和配置参考。

之前我们发布过 Pi Dashboard,一款树莓派仪表盘工具,用来显示树莓派运行状态和资源使用情况。这需要在电脑或手机的浏览器中打开树莓派上部署的网页来查看这些信息。 下面我们来 DIY 一个可爱的智能终端设备,通过 M [看全文]
Copyright © 2024 | 树莓派实验室. Raspberry Pi is a trademark of the Raspberry Pi Foundation. 沪ICP备19016635号-2